Quickstart¶
Represent geometric path and trajectory¶
In TOPP-RA, both geometric paths \(\mathbf q(s)_{s \in [0, 1]}\)
and parametrized trajectories \(\mathbf q(t)_{t \in [0, T]}\) are
represented by classes that implement the abstract interface
AbstractGeometricPath. The most important function is
__call__() which can be used to evaluate
the configuration, first-derivatives and second-derivatives
respectively.
Spline Interpolator¶
In the examples, the child class toppra.SplineInterpolator is
used extensively, due to the expressiveness and convenience offered by
cubic spline. Note that this class is implemented as a thin wrapper
over scipy’s CubicSpline. Therefore, it
requires scipy to work
properly. SplineInterpolator’s usage is simple.
>>> import toppra
>>> s_array = [0, 1, 2]
>>> wp_array = [(0, 0), (1, 2), (2, 0)]
>>> path = toppra.SplineInterpolator(s_array, wp_array)
That’s it. To verify that is works correctly, let’s try plotting.
>>> import numpy as np
>>> import matplotlib.pyplot as plt
>>> s_sampled = np.linspace(0, 2, 100)
>>> q_sampled = path(s_sampled)
>>> q_sampled[:2]
array([[0. , 0. ],
[0.02020202, 0.07999184]])
>>> plt.plot(s_sampled, q_sampled); plt.show()
[<matplotlib.lines.Line2D object at 0x...>, <matplotlib.lines.Line2D object at 0x...>]
You will see the following plot show up.
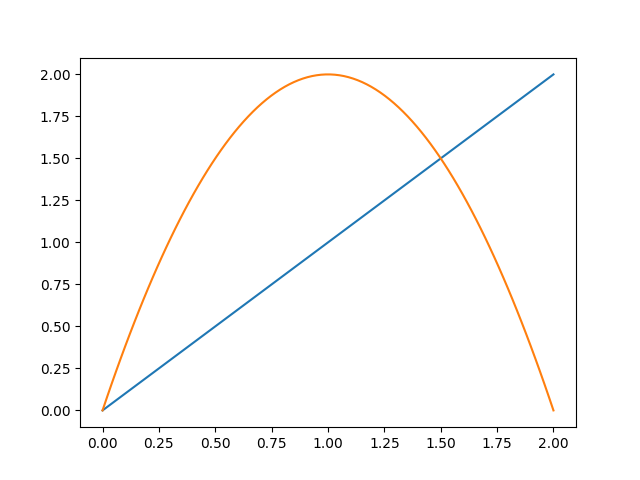
Geometric path plot.¶
The derivatives can be inspected by calling path(positions, order) using order=1 for the first derivative and order=2 for the second derivative respectively.
>>> q_dot = path(s_sampled, 1)
>>> q_ddot = path(s_sampled, 2)
Implement your own Interpolator¶
TOPP-RA can handle custom Interpolators easily, as long as it conforms
to the abstract interface of
toppra.interpolator.AbstractGeometricPath.
Retime geometric paths with parametrization¶
The parametrization step, given a fixed time-parametrization \(s(t)\) and a geometric path \(\mathbf{p}(s)\), is defined like so:
toppra provides way to realize this step programmatically. Consider a simple geometric path
>>> import toppra
>>> path = toppra.SplineInterpolator([0, 1, 2], [(0, 0), (1, 2), (2, 0)])
Let’s consider a simple parametrization
>>> gridpoints = [0, 0.5, 1, 1.5, 2]
>>> velocities = [1, 2, 2, 1, 0]
We can quickly parametrize the geometric path with toppra:
>>> path_new = toppra.ParametrizeConstAccel(path, gridpoints, velocities)
Under the hood, ParametrizeConstAccel assumes that the path
acceleration within each segment is constant. Combining with the
function composition rule, the original is
parametrized. ParametrizeConstAccel derives from
AbstractGeometricPath and defines all specified methods such
as computing the positions, derivatives and duration.
Any geometric path implementing the abstract geometric path interface
can be used with ParametrizeConstAccel.
The parametrization can be inspected
>>> path_new.plot_parametrization(show=True)
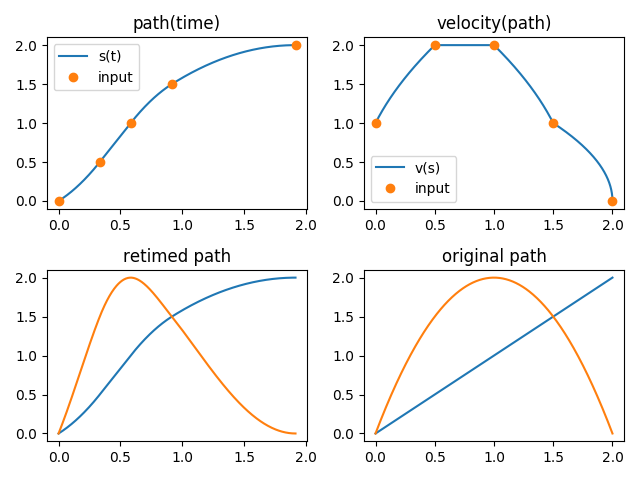
Parametrization.¶
>>> path_new(0)
array([0., 0.])
>>> path_new.path_interval
array([0. , 1.91666667])
Trapezoidal Reparametrization¶
It’s common in automation and robotics to use trapezoidal velocity
profile, or S-curve to make a movement more graceful. This can be
easily implemented using the constant acceleration reparametrizer
ParametrizeConstAccel.
See this code snippet below.
>>> path = toppra.SplineInterpolator([0, 2], [(0, 0), (1, 2)])
>>> gridpoints, velocities = (0, 0.25, 0.75, 1.0), (0, 1, 1, 0)
>>> path_new = toppra.ParametrizeConstAccel(path, gridpoints, velocities)
>>> path_new.plot_parametrization(show=True)
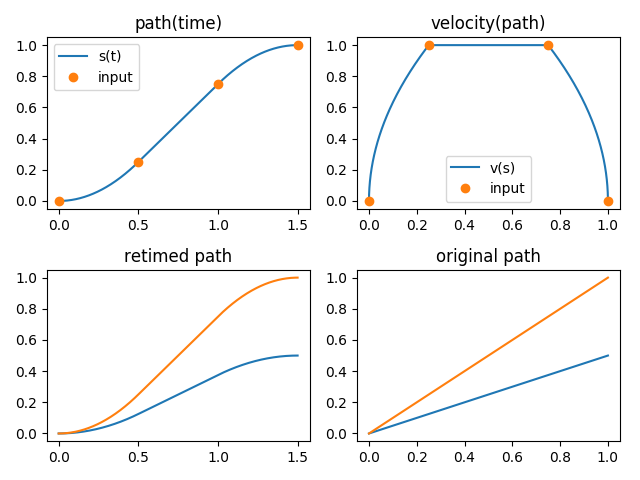
Parametrization.¶
TODO: It will be useful to have a collection of generators that generate these velocity profiles, based on the desired maximum velocity, duration, et cetera.
Time-optimal retime with kinematics constraints¶
The toppra algorithm returns the velocity profile, or the time-parametrization profile that is optimal. The resulting trajectory is also guaranteed to satisfy given constraints. Consider a simple path as below for a 2-dof robot.
>>> s_array = [0, 1, 2]
>>> wp_array = [(0, 0), (1, 2), (2, 0)]
>>> path = toppra.SplineInterpolator(s_array, wp_array)
Suppose the 2 dofs are constrained by velocity and acceleration limits.
>>> pc_vel = toppra.constraint.JointVelocityConstraint([[-1, 1], [-0.5, 0.5]])
>>> pc_acc = toppra.constraint.JointAccelerationConstraint([[-0.05, 0.2], [-0.1, 0.3]])
The time-optimal velocity profile can be found easily using TOPPRA
>>> instance = toppra.algorithm.TOPPRA([pc_vel, pc_acc], path)
>>> instance.compute_parameterization(0, 0)
Algorithm outputs are stored in the problem_data attribute:
>>> instance.problem_data.return_code
<ParameterizationReturnCode.Ok: 'Ok: Successful parametrization'>
>>> instance.problem_data.gridpoints
array([0. , 0.015625, 0.03125 , 0.046875, 0.0625 , 0.078125,...])
>>> instance.problem_data.sd_vec
array([...])
>>> path_new = toppra.ParametrizeConstAccel(path, instance.problem_data.gridpoints, instance.problem_data.sd_vec)
>>> path_new.plot_parametrization(show=True)
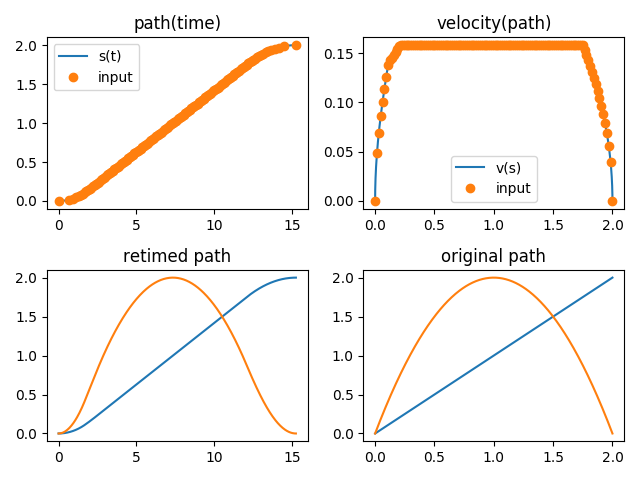
Parametrization.¶